 メールマガジン登録
メールマガジン登録 各種お問い合わせ
各種お問い合わせ
壁にぶつかり跳ね返される中でたどり着いた 人の強みを引き出す「弱いロボット」の研究
 筑紫女学園大学副学長
筑紫女学園大学副学長
岡田美智男氏
東北大学大学院工学研究科博士後期課程修了、工学博士。NTT基礎研究所、国際電気通信基礎技術研究所、豊橋技術科学大学を経て、現在、筑紫女学園大学副学長・現代社会学部教授。コミュニケーションの認知科学、社会的ロボティクス、ヒューマン・ロボットインタラクションの研究に従事している。著書に『〈弱いロボット〉から考える 人・社会・生きること』(岩波書店)などがある。
自らの機能は不完全でも、周囲の助けや関わりを自然に引き出しながら、目的を叶えてしまう―。岡田美智男氏が研究を進める「弱いロボット」は、従来のロボット観を大きく揺さぶる存在だ。音声科学との偶然の出会いから、生態心理学、人工生命、身体論、社会的ロボティクスへと関心の幅を広げ、そのたびに壁にぶつかりながら、新たな視点を獲得してきた。自身が「ランダムウォークのようだった」と語る研究の軌跡をうかがった。
ジャンケンで負けて音声科学の世界へ
「弱いロボット」の例としてわかりやすいのは〈ゴミ箱ロボット〉です。ゴミ箱の姿をしたロボットですが、自分ではゴミを拾うことができません。ヨタヨタと人に近づいてきて、ちょこんとお辞儀するだけ。それでも子どもたちは楽しそうにゴミを拾い集めてくれます。つまり、周囲の手助けを上手に引き出しながら、結果としてゴミを拾い集めてしまうロボットなのです。そんな頼りなく不完全な「弱いロボット」を、なぜ研究しているのか―その理由をお話ししたいと思います。
私は最初からロボットの研究をしていたのではありません。もともとは音声言語処理や対話理解システムに取り組んでいたのですが、あるきっかけから「コミュニケーション研究の道具としてロボットが使えるのではないか」と考えるようになりました。
これまでの変遷を振り返ると、まさに「ランダムウォーク」そのもの。壁にぶつかっては跳ね返され、そこでたまたまヒントを見つけ、また次の壁に向かっていく。その様は、部屋の壁に背中を押されるようにして動き回るお掃除ロボットの軌跡のようです。
子どもの頃は機械いじりが好きで、時計やバイクを分解しては組み立て直して遊んでいました。中学・高校時代には古いラジオや白黒テレビに入っていた真空管などを再利用し、簡単なオーディオアンプを作っていました。
ただ、学校の授業は退屈で、あまり真剣に聞いてはいませんでした。高校の数学では因数分解あたりからつまずきました。「なぜ因数分解をするのか」「虚数を二乗するとなぜ -1 になるのか」など腑に落ちないまま、実力テストでは100点満点中3点だったこともあります。これはまずいと思い直し、毎日必ず問題集を見開き2ページ解くことを自らに課しました。解けない問題は学校で友達に聞く。苦手を認めて尋ねると、相手も快く教えてくれました。こうして少しずつ成績を上げていったのです。
大学では電子工学を専攻し、量子力学に熱中した時期もあります。将来は半導体物性の研究をしたいと思っていたのですが、研究室配属の際にジャンケンで負けてしまい、音声科学の研究室へ入ることになりました。
幸いにもこの分野はとても面白いものでした。「人間の声はどのように生まれるか」「その音声をどのように認識するか」などを探る研究です。私は昔から口数が少なく、東北訛りもあって人前で話すのが苦手です。そうしたコンプレックスもあり、人の話し方が気になり観察してしまうところがあります。次第に会話やコミュニケーションそのものへの興味も芽生えていきました。
「口ごもるコンピュータ」を作る
博士論文では、音声認識と自然言語処理における探索アルゴリズムを統合する研究を行い、最初に就職したNTT基礎研究所でも、音声認識・自然言語処理・対話理解モジュールなどを統合する「音声言語システム」の研究を続けました。当時はまさに「人工知能の冬の時代」。統語的・意味的な制約を利用して最適な単語列を探索するルールベースのアプローチでは、いろいろと限界もありました。とりわけ言い直しや言い淀みを含んだ発話に対しては、とても脆弱なものでした。
こうした壁に直面する中、「言い直しや言い淀みを含んだ非流暢な発話はどのように生まれるのか」というプロセスに関心を抱くようになりました。生み出された発話を後から解析するのではなく、非流暢な発話を一緒に生み出しながら、その背後にある発話意図を探れないか―。こうした発想から「口ごもるコンピュータ」の構想が生まれ、今でもライフワークの一つになっています。
その途上で出会ったのが、佐々木正人先生らによるアフォーダンス研究会でした。「頭の中って、そんなモジュールで構成されているの?」―当時は情報処理アプローチの考え方に慣れ過ぎていて、彼らとの会話がなかなか噛み合いません。佐々木先生から教えていただいた「行為と知覚のカップリング」や「直接知覚」といった生態心理学的な概念も、最初はまったく理解できませんでしたが、半年ほど経つ頃から、なんとなく理解できるようになってきました。
例えば自動車の運転です。理屈っぽい人ほど教習所で苦労するようで、「ハンドルを右に傾けたままバックすると前方は左に……」などと考えていては、なかなか上達しません。しかし教習を終える頃には、アクセルやハンドル操作に伴うバックミラーの「見えの変化」を手がかりにクルマを自在に操れるようになります。これは行為と環境のあいだに立ち現れる「行為の可能性に関する情報=アフォーダンス」をピックアップする技を身に付けたからにほかなりません。
アフォーダンス研究会に出入りする中で、「発話は、言い直しを前提に繰り出されているのではないか」「発話は、言葉を伝える伝達行為であると同時に、知覚行為でもある」といった視点が少しずつ見えてきました。
その後、国際電気通信基礎技術研究所(ATR)に転勤したことをきっかけに、関西特有のボケとツッコミの文化に触れ、「他愛もない会話」の仕組みにも関心を持つようになりました。当時のATRは人工生命の国際的な中心地でもあり、「雑談を創発現象として捉えてみたらどうか」と考えました。こうして誕生したのが、〈トーキング・アイ〉です。仮想空間でシンプルな目玉たちが「あのなぁ」「なんやなんや」と他愛もない会話を続けるもので、こうした雑談の現象を生み出しながら、その背後にある原理を探ろうとしたのです。
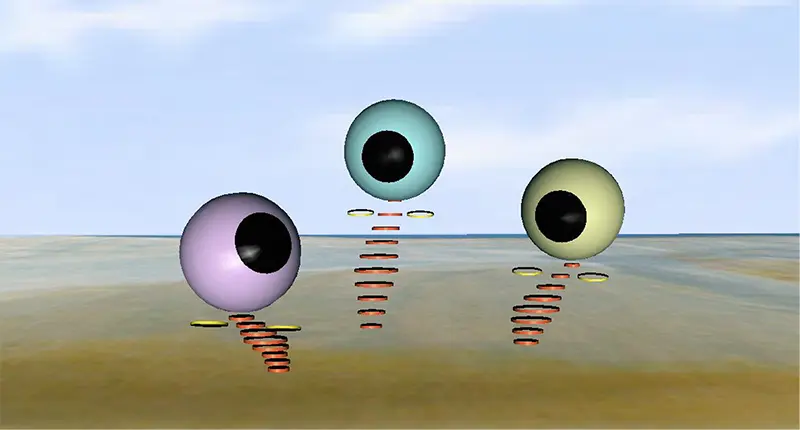 仮想空間でシンプルな目玉たちが他愛もない会話をする<トーキング・アイ>(写真:岡田氏提供)
仮想空間でシンプルな目玉たちが他愛もない会話をする<トーキング・アイ>(写真:岡田氏提供)
しかし「他愛もない会話」を生み出すことは予想以上に難しいものです。一つひとつの発話の意味を考えすぎると雑談らしさから遠ざかってしまうのです。また「言葉のリアリティ」という壁にもぶつかりました。モニターの中で彼らが「助けて!」と叫んでも、「助けてあげたい」という気持ちが湧かないのです。
発話のリアリティはどのようにして生まれるのか。当時はコミュニケーションにおける身体性の役割が注目されていたこともあり、「バーチャルなエージェントは身体を欠いているからなのでは……」と考えました。そこでロボットの身体を借りてコミュニケーションの研究をしてみたいと思ったのです。
しかし私はロボット技術に関しては素人です。ヨーロッパの認知ロボティクスの研究機関を訪ね歩いてみると、後追いしたところでとても太刀打ちできそうにありません。そんなとき「Socializing Cognitive Robotics」というフレーズが浮かんできました。「人とのソーシャルな関わりを指向する社会的なロボットはどうだろう」というわけです。
そこで上司に「ロボットを作ってみたい」と相談しました。しかし、肝心の理由をうまく説明できず、理解は得られません。今ならわかりますが、「ただ、なんとなく……」では研究費は使わせてもらえないのです。
そんな折、近くの雑貨屋をブラブラしてみると、様々なモノがロボットの部品に見えてきました。麻袋、スプリング、帆布のランドリーバスケット……。そこで手に入れた大きなスプリングの上に遠隔会議用カメラを載せてみると、それがプルルンと揺れたのです。このことがきっかけとなって、シンプルでかわいい〈コムソウ君〉や〈む〜〉が生まれてきました。あり合わせを集めてその場を凌ぐことは「ブリコラージュ」と呼ばれますが、新たなモノを生み出すときには、この技術的制約や予算的制約も味方になってくれることがあるのです。
 ブリコラージュでつくられた<コムソウ君>(写真:岡田氏提供)
ブリコラージュでつくられた<コムソウ君>(写真:岡田氏提供)
もう一つ、上司を説得する際によく使ったのは、「外堀から埋める」作戦です。ATRでは「オープンハウス」という公開イベントを重視していました。そんな機会を利用し、アンダーグラウンドで進めていたプロジェクトの成果を披露してしまうのです。すると多くの人が「面白い!」と話題にし、メディア取材など、外部の一定の評価が得られると、上司も「仕方ないなぁ」と承認してくれたのです。
弱さが人の優しさを引き出す
私たちの代表的なロボット〈む〜〉が生まれてから、かれこれ25年以上になります。かつて幼稚園に連れて行ったことがあります。「子どもたちの世話をするロボットにならないか」と期待してはいたものの、所詮は素人が手作りしたシンプルなロボット。しばらく様子を見ていると、〈む〜〉の拙さにしびれを切らした子どもたちが反対に世話を始めたのです。この光景を目にして、「弱さには積極的な意味があるのかもしれない」と思うようになりました。「自分で動けないなら誰かに動かしてもらえばいい」、「自分で拾えないなら誰かに拾ってもらえばいい」、「表情が乏しいなら誰かに積極的に解釈してもらえばいい」というわけです。
 子どもたちが世話をし始めてしまう<む~>(写真:岡田氏提供)
子どもたちが世話をし始めてしまう<む~>(写真:岡田氏提供)
海外で展示する機会もありました。英語の音声認識エンジンへの切り替えが間に合わず、クレーアートアニメの『ピングー』を参考に、赤ちゃんの喃語のような非分節音で反響模倣する仕掛けを用意して、急場を凌ぎました。この工夫が思いのほか好評で、「ハロー!」「オーラ!」など各国の言葉にも「むっ、むむ〜」「むむむ〜」と健気に返します。意味不明なその発話には普遍性があり、多様な解釈を引き出す「余白」となっていたのです。こうした試みを通して、「弱いロボット」の輪郭が少しずつ見えてきました。
2006年に豊橋技術科学大学に異動した後に、モノづくりマインドに溢れた学生たちと手がけたのが、冒頭で触れた〈ゴミ箱ロボット〉です。愛知県で開催された「愛・地球博」のプロトタイプロボット展に向けて提案したのですが、書類審査ではあえなくも落選。「人に手伝ってもらわないとゴミを拾い集められないロボットなんて、ロボットとは言えないのでは?」、「もっと未来志向のロボット技術を提案してよ!」――当時の評価者からはまったく相手にされなかったのです。
 子どもたちの強みや工夫を引き出す<ごみ箱ロボット>(写真:岡田氏提供)
子どもたちの強みや工夫を引き出す<ごみ箱ロボット>(写真:岡田氏提供)
あるとき、〈ゴミ箱ロボット〉を子どもたちの遊んでいる広場に連れて行ってみました。はじめは「なんだコイツは?」と不思議そうに眺めていた子どもたちが、次第にゴミを拾い集めてきてくれるようになり、ゴミの分別までもはじめたのです。ロボットの弱さや不完全さが、子どもたちの強みや工夫を引き出すのです。「手伝ってあげるのも、まんざら悪い気がしない」というわけで、どこか誇らしげな表情を見せていました。
自らの能力が十分に活かされ、活き活きとした幸せな状態は「ウェルビーイング」と呼ばれます。〈ゴミ箱ロボット〉との関わりは、まさに子どもたちのウェルビーイングをアップさせていたのです。
近年では、小学校・中学校・高等学校の教科書にも〈弱いロボット〉の話題が教材文として採用されています。そこで、こうした考え方を教科書で学ぶだけでなく、〈弱いロボット〉そのものを教育現場に応用できないものかと考えています。
例えば、子どもたちが〈弱いロボット〉の世話をしながら自らのスキルを高め、それに合わせてロボットの能力も高まっていくような共学習型の教材。あるいは、子どもたちと〈弱いロボット〉が互いの弱さを補い、強みを引き出し合う協働的な学習環境への展開などを構想しています。何より〈弱いロボット〉たちがもっと身近で、親しみのある存在になればと願っています。
こうして振り返ってみると、私は幾度となく壁にぶつかり、そのたびに跳ね返されてきました。しかし、跳ね返された場所に次につながるヒントが落ちていたり、意外な人たちと出会ったりして、新たな道がどんどん拓けてきたのです。そういう意味では、私はとても運がよかったのだと思います。
先にも述べたように、ロボットを作りたいと考えたときも、十分な予算はありませんでした。しかし、あのとき手作りでロボットを制作していなかったら、〈弱いロボット〉のコンセプトは生まれていなかったはずです。〈ゴミ箱ロボット〉も、たまたま雑貨屋で見つけたランドリーバスケットをヒントに誕生しました。ロボティクスの知識も十分ではなく、ロボットアームを付けるのが難しいなら、子どもたちの手を借りてしまったらどうか。苦し紛れなのですが、そんな発想が自然と湧き上がってきました。
私たちの〈弱いロボット〉の多くは、こうしたあり合わせを活かすブリコラージュから生まれてきたのです。血で血を洗う競争の世界、いわゆる「レッドオーシャン」を避け、だれもまだ泳いでいない「ブルーオーシャン」を見つけ、自らの得意分野を活かしながら研究を楽しんでしまう。新しいモノやコンセプトというのは、そうした偶然に身を委ね、思いがけない出会いを楽しむ中から生まれてくるものだと思うのです。
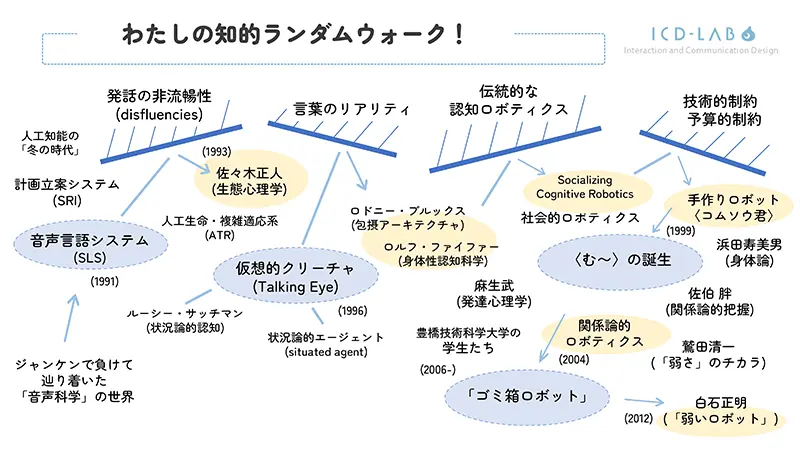 壁にぶつかって跳ね返されて、新たな道が拓けてきた岡田氏の知的ランダムウォーク(岡田氏作成)
壁にぶつかって跳ね返されて、新たな道が拓けてきた岡田氏の知的ランダムウォーク(岡田氏作成)
TEXT=瀬戸友子 PHOTO=刑部友康


