 メールマガジン登録
メールマガジン登録 各種お問い合わせ
各種お問い合わせ
作業負担が重く危険を伴う、路面マーキング作業をロボットで省力化(NIPPO)
【Vol.9】NIPPO 総合技術部 ICT推進室ICT推進グループ 課長 門田 誠也(もんでん ともや)氏/ 総合技術部 ICT推進室ICT推進グループ 機械技術担当課長 立花 洋平(たちばな ようへい)氏

道路の舗装工事、修繕工事は一度に多くの人員を必要とするうえ、大型機械と同じエリアで働くなど危険を伴う。こうした作業の省力化や安全性向上は以前から業界の課題となっていた。道路舗装業界の最大手NIPPOでは、まずこうした工事の準備段階で行う路面マーキング作業をロボットで自動化した。2019〜2020年に実証実験を行った後、現在は実際の工事現場での活用も進んでいる。ロボット導入の経緯やその効果などを、同社ICT推進室門田誠也氏、立花洋平氏に聞いた。
多くの作業員と大型機械が交錯して行う道路工事
一般的な道路の舗装工事、傷んだアスファルト舗装を撤去し、新たにアスファルト舗装材(加熱アスファルト混合物)を敷き直す修繕工事は、様々な役割を担う作業員が、狭いエリアで同時に作業を進めていく形をとる。これは、工事に使うアスファルト舗装材は高温のまま現場に運ばれ、現場では品質確保に適した温度を保ちながら道路に敷きならし、押し固めるといった一連の作業を、温度が低下する前に遅滞なく進める必要があり、多くの作業員がこれらの作業を手分けして行うためである。
現場には、舗装材を運び込むダンプトラック、舗装材を敷きならすためのアスファルトフィニッシャと呼ばれる重機、敷かれた舗装材を自重で押し固めるロードローラなど、様々な大型機械が稼働していることが多く、作業の安全性確保に十分な注意が必要となる。しかも、すべての作業が大型機械で完了することはほとんどなく、作業員が舗装材の温度に留意しながら手早く端部の整形作業などを行っていく。また、現場の交通規制は道路の一部をカラーコーンで仕切った程度の状況であり、すぐ近くを多くの車が行き交うなど現場の外側も決して安全ではない。
こうした道路の舗装工事、修繕工事の現場について、門田氏は「機械は進歩しても作業の流れや作業員の体制は1960年代から大きく変化することなく、多くの作業員を同時に必要とし、常に危険と隣り合わせの作業となっています。また、休日や夜間の作業の多さなどを理由に敬遠されやすい業種でもあるため、今後予測されるさらなる人材不足には強い危機感を抱いています」と話す。
舗装工事、修繕工事の省力化は必須と言えるが、前述のように多くの作業員と大型機械が阿吽の呼吸で進める作業の一部をすぐに自動化することは容易ではない。そこで同社は、まず工事の準備段階で行う路面マーキング作業の省力化に取り組み、小型ロボットによる自動化で成果をあげている。
自律ラインマーキングロボット紹介動画
GNSSで自動走行する小型ロボットが路面にマーキング
路面マーキング作業とは工事を行う範囲を路面に示すものである。例えば修繕工事は傷んだ路面のアスファルト舗装を削り、新たにアスファルト舗装材を敷き直す作業で、道路を規制できる時間の制約などから一定のエリアを日ごとに移動させながら修繕していく。その作業範囲を示すマーキングは、これまで手作業で行っていたという。
 従来の路面マーキング作業の様子
従来の路面マーキング作業の様子
手作業によるマーキングは、作業の担当者に安全監視員を加えた3、4人の作業員で行い、既に道路に引かれている白線に沿って、作業範囲となるラインをスプレーやチョークなどで引いていく。工事の規模にもよるが1日に数百メートル、長い場合はキロメートル単位でのマーキングが必要になってくる。しかもすぐ近くを車が走るなか、道路にカラーコーンを置いただけの交通規制の状態で路面にラインを引く作業は危険を伴い、体力的にも精神的にも負担が大きい作業となっていた。
 同社はこの作業の省力化に向け海外技術の調査を行った結果、ラインマーキングを行う小型ロボットのうち、GNSS(Global Navigation Satellite System/衛星測位システム)を用いて自機の位置を割り出し、自動走行でマーキングするタイプを選定した。また、ランニングコストを抑えるため、市販の路面標示用スプレー缶を使える点も評価したという。この小型ロボットは、デンマークのメーカーが販売している製品のため、マニュアルの日本語版制作や、修繕工事に適用するための緊急停止機能の追加などの調整は同社で行ったが、機能面ではそのまま利用できたと立花氏は言う。
同社はこの作業の省力化に向け海外技術の調査を行った結果、ラインマーキングを行う小型ロボットのうち、GNSS(Global Navigation Satellite System/衛星測位システム)を用いて自機の位置を割り出し、自動走行でマーキングするタイプを選定した。また、ランニングコストを抑えるため、市販の路面標示用スプレー缶を使える点も評価したという。この小型ロボットは、デンマークのメーカーが販売している製品のため、マニュアルの日本語版制作や、修繕工事に適用するための緊急停止機能の追加などの調整は同社で行ったが、機能面ではそのまま利用できたと立花氏は言う。
 稼働中の自律ラインマーキングロボット
稼働中の自律ラインマーキングロボット
「ロボットは、マーキングする位置を示したCADデータを読み込み、それを基にGNSSで自機の位置を把握し走行位置を制御しながらマーキングしていきます。このロボットに限らず、GNSSによる計測では数センチの誤差が生じるため、同機でのマーキング作業は2cm程度の誤差を許容できる工事で使用しています」(立花氏)
ロボットの操作や設定は、タブレットにインストールした専用アプリから行う。同機はCADのラインデータを基に自動走行するが、タブレットからマーキングするラインの延長、ラインデータから任意の距離にオフセットしたラインのマーキングなども行え、基準となるラインデータを基に現場に応じた調整が可能となっている。
 専用ソフト画面 (ラインデータ表示)
専用ソフト画面 (ラインデータ表示)
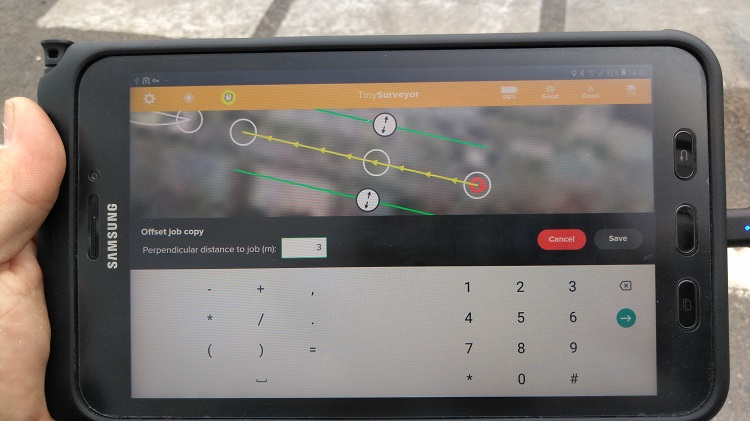 専用ソフトによるラインオフセット
専用ソフトによるラインオフセット
大規模工事ほど効果が高い路面マーキング作業の省力化
同社が2019〜2020年に行った実証実験では、複数の作業員による手作業に比べ、自動走行ロボットでは作業効率が7〜20倍も向上。大規模な工事ほど作業効率の向上が著しいという結果が出ている(表1参照)。
ロボットを稼働させる際は、走行の準備や周囲の安全確保、不測の事態への対応のため、必ず作業員が1人付き添っているが、それでも3、4人が必要だった手作業に比べて必要な人員は激減する。加えて、手作業のマーキングで強いられる立ち姿勢と中腰姿勢の繰り返し動作もなくなり、作業員の身体的な負担も大幅に軽減された。
これにより、マーキング作業を担当していた人員をほかの作業に充てられるほか、作業時間も28h→7.5h、6h→3.5h、0.8h→0.25hと削減でき、準備段階の時間が減ることで工事全体の効率化にも役立つことになる。また、作業員は一般車が通行するすぐそばにいる必要がなく離れた位置で作業できるため、手作業の時に比べて安全性も向上している。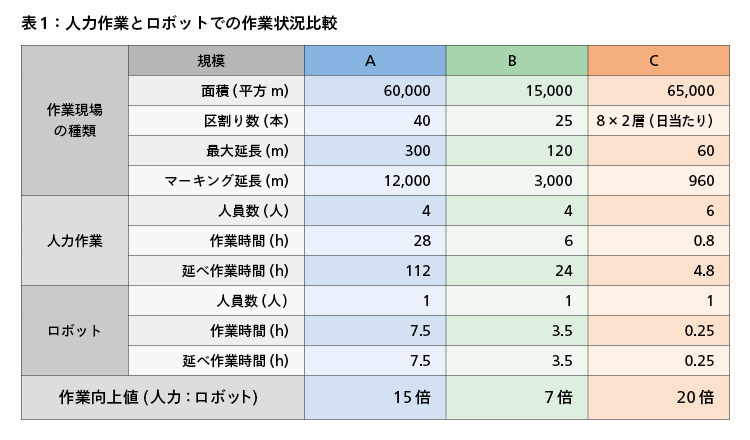
「路上マーキング自体は、工事全体の作業量に占める割合で見ると1割前後に過ぎません。とはいえ、舗装工事でアスファルト舗装材を何層も敷き重ねる場合は、同じ作業を繰り返すことになり、作業負担は大きくなります。しかも舗装面の開始・終了位置などの継ぎ目を毎回同じにすると耐水性が低下して、道路の強度や寿命に影響を及ぼすため、これらの位置を各層ごとに変える必要があります。ロボットなら元のラインデータ(基準位置)から各層ごとに計画した継ぎ目の位置となるように距離設定を変更できるため容易に対応できます」(立花氏)
ロボットを現場へ導入するには、事前に現地を測量してCADのラインデータを作成する手間が必要であり、初期投資やメンテナンスの費用もかかる。また、携帯電話などのデータ回線が使える場所でしかGNSSによる位置補正ができないというデメリットもある。それでも作業人員の大幅な削減、作業効率の向上といったメリットは大きい。実証実験の結果から、そのように判断した同社ではロボットの本格導入に踏み切り、現在は同機を5台保有。高速道路や大規模な舗装工事におけるマーキングを中心に活用し、作業の省力化と安全性の向上を図っている。
ただ、測量やラインデータ作成の手間が増えるため、工事の規模によって導入メリットに差があり、都市部で夜間6、7時間だけの工事といった導入メリットが出にくい現場では使用しないため、ロボットを利用する機会は現状では限られるという。
「それでもロボットを適用した工事担当者からの評価は高く、人材不足への対応や安全性向上の効果を考えると、業界全体に広く普及してほしいと願っています」(立花氏)
このほか、同社では修繕工事の際、現状の舗装面を削り下げる作業でも省力化を進めている。道路の舗装面を削る際は、どれだけの幅・深さで削り下げるかは設計で決められているが、そのとおりの形状になっていることを確認・記録する出来形管理で、従来は4、5人の作業員が同時に必要となる方法で計測し、写真に収めていた。
 そこで同社は、路面に設置した標定点(ターゲット)を複数の異なる視点からデジカメにて撮影し、それら写真の視差を解析することで出来形管理ができる写真測量技術「Nコレ・メジャー+(プラス)」を横河技術情報と共同開発し、工事現場で活用している。これにより、作業員は4、5人から1人に削減でき、誤差が出やすかった出来形計測の精度が増すなど、高い導入効果が得られている。
そこで同社は、路面に設置した標定点(ターゲット)を複数の異なる視点からデジカメにて撮影し、それら写真の視差を解析することで出来形管理ができる写真測量技術「Nコレ・メジャー+(プラス)」を横河技術情報と共同開発し、工事現場で活用している。これにより、作業員は4、5人から1人に削減でき、誤差が出やすかった出来形計測の精度が増すなど、高い導入効果が得られている。
 写真測量技術「Nコレ・メジャー+(プラス)」による出来形管理
写真測量技術「Nコレ・メジャー+(プラス)」による出来形管理
安全性を優先しながら工事現場の人員半減を目指す
道路の舗装工事、修繕工事での省力化は始まったばかりで、今後は準備や出来形計測以外の作業での省人化も考える段階に入っていく。
現状の技術で省力化・自動化が見込める作業工程としてアスファルト舗装材の温度管理や舗装材を敷きならす作業などがあり、それらを行う機械の自動化やロードローラの自律化などが実現すれば、工事に必要な人員は将来的には半分程度に減るのではないかと同社は予測する。一方、それ以上の削減には新たな技術革新が必要だという。
しかし、そうした省力化・自動化を進める際は「作業員の安全確保が大前提になる」と門田氏、立花氏は口を揃える。
「このため、まずは大型機械の周辺における作業から省人化を図り、安全性の向上と人材不足に対応しながら、確かなものづくりと生産性の向上を両立できる作業工程を考えていくことが重要と認識しています」(門田氏)
高齢化が進み、人材不足への対応が急務となるなか、小型ロボットや写真測量技術を用いた出来形管理などを実現した同社には、作業の安全性を重視しながら着実に工事の省力化・自動化を進めていくことが期待される。


